-
Il carrello è vuoto!
Il carrello è vuoto!
Con il proliferare dei veicoli aerei senza pilota (UAV) sia nelle applicazioni civili che militari, cresce anche la necessità di metodi accurati di rilevamento e identificazione. Sebbene i droni siano spesso impiegati per il monitoraggio ambientale e le misurazioni dell'infrastruttura, crescono le preoccupazioni tra le comunità di tutto il mondo riguardo all'uso non sicuro dei UAV. Queste preoccupazioni hanno spinto i ricercatori dell'Università Politecnica delle Marche (UNIVPM) in Italia a cercare nuovi metodi di rilevamento affidabili per identificare gli UAV, specialmente quelli che volano in aree urbane con carichi non identificati. Attualmente, il radar è il metodo più comune utilizzato per rilevare gli UAV, anche se esistono altre tecniche, tra cui telecamere, LiDAR, sensori RF e microfoni acustici. Poiché i bersagli volanti sono spesso difficili da individuare, i ricercatori si stanno sempre più rivolgendo a questi metodi alternativi per una rilevazione degli UAV più accurata e completa.
Gli UAV hanno eliche rotanti che producono vibrazioni nel telaio. I ricercatori dell'UNIVPM sperano di rilevare e misurare queste vibrazioni attraverso l'effetto micro-Doppler, utilizzando il radar a onda continua modulata in frequenza (FMCW). La loro configurazione sperimentale è illustrata nella Figura 1.
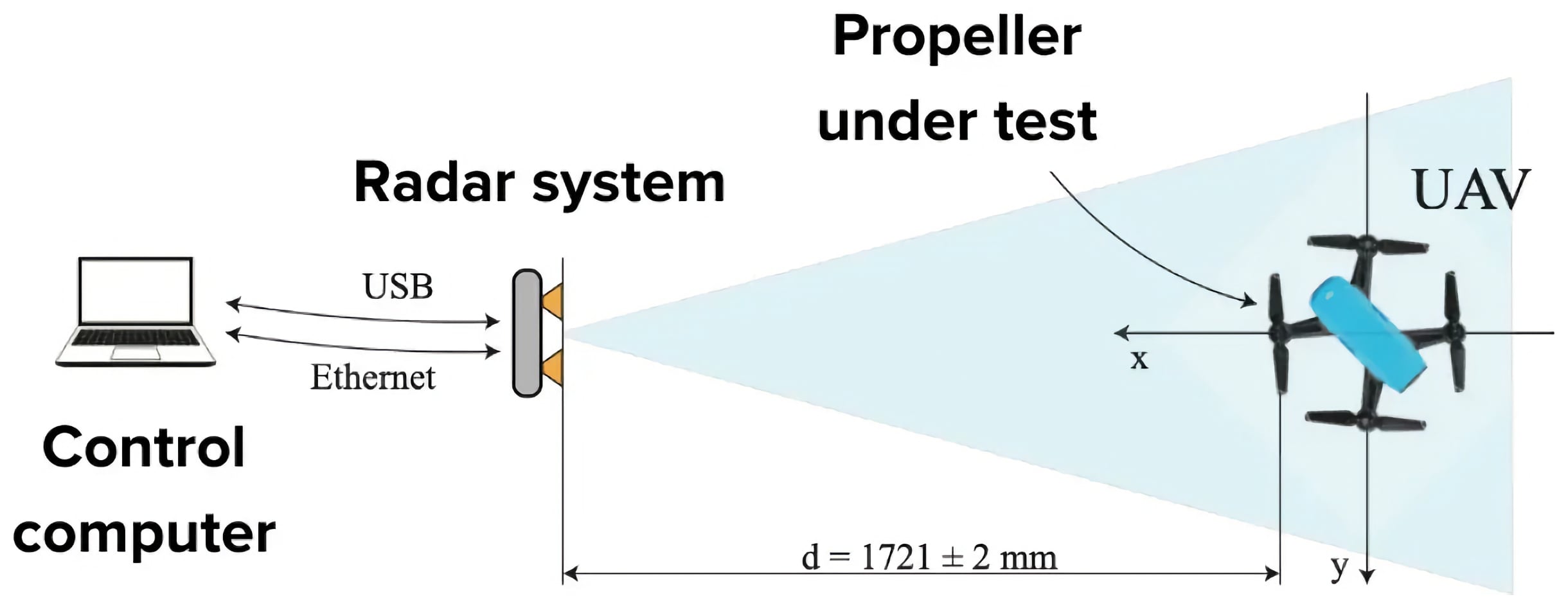
Figura 1: Il team ha utilizzato questa configurazione sperimentale per l'acquisizione radar.
Per condurre questa ricerca, il professore associato Susanna Spinsante, il ricercatore post-dottorato Gianluca Ciattaglia e i loro colleghi hanno utilizzato Moku:Go, un dispositivo di test basato su FPGA che offre più di 13 strumenti software in un unico di hardware. Questi strumenti spaziano dagli strumenti ingegneristici essenziali come un oscilloscopio a strumenti avanzati come un Laser Lock Box. La vasta gamma di strumenti facili da usare consente ai ricercatori di ottenere di più, più velocemente, in contesti che vanno dai laboratori didattici alle strutture di ricerca e sviluppo dell'industria.
La sfida
La velocità di rotazione delle eliche sui droni e sugli altri UAV è una quantità difficile da individuare. Questo perché le pale del drone hanno una sezione radar estremamente piccola, rendendole praticamente impossibili da rilevare. Per utilizzare efficacemente il radar per identificare questi piccoli UAV, il team di ricerca dell'UNIVPM ha considerato più metodi di misurazione. Inizialmente, hanno valutato la possibilità di misurare la velocità sulla mappa range-Doppler per estrarre la velocità e la lunghezza delle pale. Tuttavia, hanno scoperto che questo metodo non è adatto per UAV ad alta velocità, poiché la frequenza di ripetizione degli impulsi radar trasmessi richiesta dovrebbe essere molto alta. Successivamente, il team ha valutato la possibilità di misurare l'effetto micro-Doppler delle eliche, ma ha affrontato le stesse limitazioni della misurazione della velocità. Inoltre, raccogliere la gamma di strumenti e attrezzature necessari per effettuare queste misurazioni è un'impresa costosa e che richiede molto tempo.
Per fare progressi, il team ha deciso di ricorrere a un altro metodo: misurare l'effetto collaterale della rotazione, piuttosto che misurare direttamente la rotazione stessa. Misurando le vibrazioni del telaio del drone introdotte dalla rotazione dell'elica, il team ha cercato di aggirare i problemi normalmente associati alle misurazioni radar degli UAV.
La soluzione
Con strumenti flessibili e integrati, Moku:Go ha fornito una soluzione intuitiva ed efficace per effettuare misurazioni di rilevamento UAV più veloci e più facili.
"La flessibilità è una delle caratteristiche più rilevanti di questa piattaforma e di questo dispositivo," ha detto Susanna.
Per eseguire l'analisi delle vibrazioni, il team ha utilizzato i seguenti materiali:
Il team ha acquisito segnali dall'accelerometro e dal sensore radar contemporaneamente per confrontare i risultati. Per farlo, hanno inviato un segnale PWM da Moku:Go, con tempo di attivazione impostato da 1,1 a 1,6 ms con un passo di 0,1 ms. Il team ha scoperto che avere la capacità di controllare come venivano inviati i segnali di controllo al motore era indispensabile.
"Utilizziamo dispositivi Moku abbastanza spesso - sono potenti," ha detto Susanna. "Possiamo facilmente configurare diverse impostazioni e misurazioni con lo stesso dispositivo, il che è molto utile, ad esempio, quando si sincronizzano gli ingressi e le uscite."
I ricercatori hanno quindi eseguito una trasformata di Fourier rapida (FFT) sui dati raccolti per determinare il valore delle rotazioni al minuto (RPM) dell'elica. Per estrarre le informazioni vibrazionali, hanno prima analizzato i segnali di battuta. Successivamente, hanno organizzato i loro dati rilevati in un cubo, posizionando campioni di un singolo chirp lungo un asse chiamato Fast-Time. In un secondo tempo, hanno posizionato campioni di diversi chirp lungo un asse Slow-Time. Infine, hanno posizionato campioni da diversi ricevitori lungo l'asse di campionamento spaziale. Il team ha quindi eseguito una FFT bidimensionale del piano di campionamento spaziale Fast-Time per produrre la Figura 2.

Figura 2: Una mappa di rilevamento di esempio con bin FFT. La parte con il riquadro rosso identifica la posizione del bersaglio [1].
Da questa posizione del bersaglio, il team potrebbe facilmente estrarre la fase del segnale e filtrare spazialmente le vibrazioni dai bersagli indesiderati. Utilizzando queste informazioni di fase, possono determinare lo spostamento delle vibrazioni e persino convertirle in metri per determinare la distanza. Per una validazione aggiuntiva della velocità di rotazione, il team ha misurato con un tachimetro laser DT2234C+ ed estratto lo spettro del segnale vibrazionale mostrato nella Figura 3.

Figura 3: Lo spettro del segnale vibrazionale dell'elica a due pale estratto dal sensore radar con un duty cycle PWM del 75% [1].
Il risultato
Integrando Moku:Go nel loro esperimento, Susanna e Gianluca hanno semplificato notevolmente i loro test con risultati affidabili e ripetibili, vedendo anche benefici inaspettati.
"Una caratteristica interessante di Moku è la connessione Wi-Fi," ha detto Gianluca. "Posso avviare una misurazione da lontano dal mio setup - altri strumenti non hanno questa funzionalità. Lavorando con le eliche, è preferibile stare lontani dal setup per motivi di sicurezza."
Dopo aver completato l'esperimento, il team ha riscontrato una corrispondenza tra la velocità di rotazione dell'elica estratta dai segnali di accelerazione del motore, la velocità di rotazione misurata con un tachimetro e la velocità di rotazione estratta dalle vibrazioni misurate. Questa verifica sblocca metodi più affidabili per rilevare droni e altri UAV per applicazioni critiche di difesa. La Tabella I mostra i risultati per l'elica a tre pale, mentre la Tabella II mostra i risultati per l'elica a due pale, entrambi con bassi livelli di errore tra i metodi di misurazione.
| PWM Dc | RPM Tachimetro | RPM acc, mag | RPM Radar | △RPM% Tachimetro, Radar | △RPM% acc, mag, Radar |
| 55 [%] | 2640 [RPM] | 2519 [RPM] | 2568 [RPM] | 2,7% | -1,9% |
| 60 [%] | 4100 [RPM] | 4101 [RPM] | 4138 [RPM] | -0,9% | -0,9% |
| 65 [%] | 5200 [RPM] | 5214 [RPM] | 5338 [RPM] | -2,6% | -2,4% |
| 70 [%] | 6100 [RPM] | 6064 [RPM] | 6166 [RPM] | -1,1% | -1,7% |
| 75 [%] | 6800 [RPM] | 6826 [RPM] | 6898 [RPM] | -1,4% | -1,1% |
| 80 [%] | 7400 [RPM] | 7353 [RPM] | 7465 [RPM] | -0,9% | -1,4% |
Tabella I: I risultati ottenuti dall'elica a tre pale con i valori di RPM calcolati dalla frequenza estratta dei segnali di accelerazione e radar sono arrotondati per difetto all'intero; riprodotti dal paper [1].
| PWM Dc | RPM Tachimetro | RPM acc, mag | RPM Radar | △RPM% Tachimetro, Radar | △RPM% acc, mag, Radar |
| 55 [%] | 1300 [RPM] | 1303 [RPM] | 1330 [RPM] | -2,3% | -2,1% |
| 60 [%] | 2000 [RPM] | 2006 [RPM] | 2126 [RPM] | -6,3% | -5,9% |
| 65 [%] | 2600 [RPM] | 2578 [RPM] | 2679 [RPM] | -3,1% | -3,9% |
| 70 [%] | 3300 [RPM] | 3310 [RPM] | 3428 [RPM] | -3,8% | -0,3% |
| 75 [%] | 4000 [RPM] | 3881 [RPM] | 4015 [RPM] | -0,4% | -3,4% |
| 80 [%] | 4500 [RPM] | 4555 [RPM] | 4580 [RPM] | -1,8% | -0,6% |
Tabella II: I risultati ottenuti dall'elica a due pale con i valori di RPM calcolati dalla frequenza estratta dei segnali di accelerazione e radar sono arrotondati per difetto all'intero; riprodotti dal paper [1].
Conclusione
Dopo il successo del loro esperimento, Susanna e Gianluca hanno in programma di espandere la loro ricerca e l'uso di Moku:Go. In futuro, intendono utilizzare un accelerometro calibrato come valore di riferimento per lo spostamento vibrazionale, nonché mirare a determinare quali altri fenomeni fisici possono essere sfruttati per misurare la velocità di rotazione dell'elica degli UAV senza accesso diretto al drone.
Oltre a questa applicazione, Susanna utilizza Moku:Go per far conoscere agli studenti universitari i principi della misurazione elettronica. Lo utilizza anche per insegnare corsi di laurea magistrale focalizzati su sensori e trasduttori. Susanna, i suoi collaboratori e i suoi studenti utilizzano tutti Moku:Go per preparare laboratori, relazioni e presentazioni.
"Una caratteristica molto utile è la possibilità di esportare tracce, forme d'onda e dati in formato MATLAB," ha detto Susanna. "Questo predispone il lavoro per gli studenti, o per noi, se dobbiamo preparare bozze per i nostri articoli."
Anche Gianluca utilizza Moku:Go in tutti i suoi esperimenti, evidenziando le capacità di registrazione dati triggerati e i vantaggi di archiviazione.
"È utile quando si effettuano molte misurazioni," ha detto. "Puoi memorizzare tutti i dati sul dispositivo Moku, quindi scaricarli dopo la parte sperimentale del tuo lavoro."
Note a piè di pagina
[1] G. Ciattaglia, G. Iadarola, L. Senigagliesi, S. Spinsante, ed E. Gambi, "Misurazione della Velocità di Rotazione dell'Elica UAV tramite radar FMCW," Remote Sensing, vol. 15, n. 1, genn. 2023. doi:10.3390/rs15010270
















Leave a Comment